
Les instruments
La robot martien est doté de nombreux instruments :
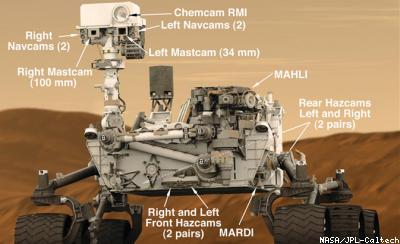
- MASTCAM : deux cameras stéréoscopique permettant de mieux identifier les structures géologiques et observer la météo. En couleurs et proche infrarouge.
- MAHLI : un microscope monté sur le bras articulé. La résolution maximale est de 15µm. Les images peuvent être en couleurs ou en rayonnement UV.
- CHEMCAM : un spectromètre permettant d'analyser la roche. Un LASER tire sur la roche à analyser. La lumière émise par cette roche sur l'effet du rayon permet, par spectroscopie d'en obtenir la composition détaillée. Cet instrument à été réalisé au Centre d'étude spatiale des rayonnements (à Toulouse) et à l'observatoire de Toulouse.
- SAM : analyse des éléments chimiques et isotopiques des échantillons.
- RAD : analyse des radiations atteignant la surface de Mars.
- APXS : un spectromètre à rayons X permettant de détecter des éléments lourds dans le sol.
- CheMin : analyse d'échantillons de roche et de leur éventuelle structure cristalline.
- DAN : détecteur de neutrons permettant de connaitre la quantité d'eau présent dans le sol jusqu'à un mètre de profondeur. Les mesures suivant l'évolution de la sonde ceci devrait donner une cartographie de l'eau aux endroits de passage.
- REMS : une station de mesure météo, répartie en différents points de la sonde pour une meilleure précision notamment pour la mesure des vents.
- MARDI : une petite caméra couleur retransmettant des images lors de la décente vers le sol dans le but de cartographier le site d'atterrissage.
- MEDLI : instruments de mesures utilisé durant la rentrée dans l'atmosphère.
L'atterisseur
La méthode utilisé pour amarsir sur la planète rouge est différente de celles employés jusque là. En effet la sonde doit se poser sur le site prévu et la marge d'erreur est bien moins grande que celle admise lors des missions précédentes.
- La décente commence par une rentrée atmosphérique durant lequel le bouclier thermique de la sonde chauffe sous l'effet du frottement dans l'atmosphère. Ce frottement ralentit fortement la sonde.
- Ensuite la décente ce poursuit en parachute jusqu'à une altitude de plus de 1,5 km.
- Les rétrofusées de la sonde permettent alors de diriger précisément la sonde vers sa destination.
- Une fois la sonde immobilisée à 21m du sol la sonde est séparée du module de décente et des treuils permettent de déposer la sonde en douceur.
- Une fois la sonde posée les câbles le relient au module de décente sont coupés. Le module s'éloigne alors et s'écrase plus loin.
L'image est une illustration de la dépose sur le sol de la sonde (en bas) par de module de décente (en haut), remarquez les câbles.

Arrivée sur Mars
La sonde s'est posée avec succès sur Mars dans le cratère Gale le 6 août 2012. Ce cratère à été choisi en raison d'un environnement qui serait parmi les plus favorable à l'apparition de la vie sur cette planète, il s'agit en effet du fond d'un ancien lac. Il est important de préciser que cette sonde ne recherchera pas de manière directe la vie mais permettra de savoir si cette dernière aurait pu apparaitre et si ces conditions aurait pu perdurer jusque aujourd'hui notamment dans le sol de la planète rouge.
L'image visible à droite est la première image retransmise par la sonde. Elle à été prise avec la camera à très grand angle et montre l'ombre de la sonde sur la planète.
